Computer sciences
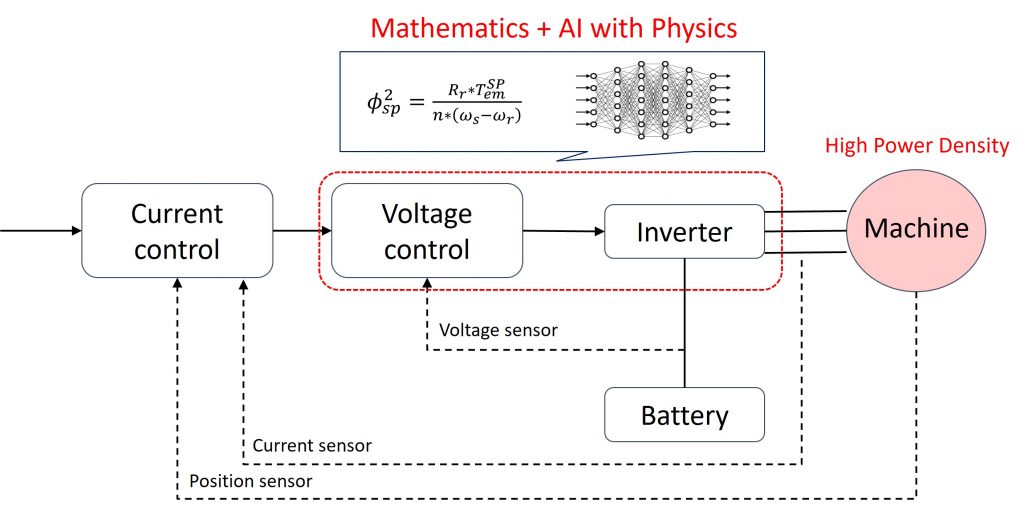
Future electric drives
The control of power systems such as electric drives is becoming more and more complex due to the inherent non-linearity of the electric motors of the future. With such motors, it is hard to fulfill the need of an explicit machine model like most state-of-the-art control approaches. We are seeking algorithms to insure, despite using an incomplete model, an optimum control with high torque and high efficiency. We are combining the strengths of mathematical control laws with the possibilities of AI guided by Physics to cope with non-linear phenomenon. These algorithms are eventually evaluated using a test bench.
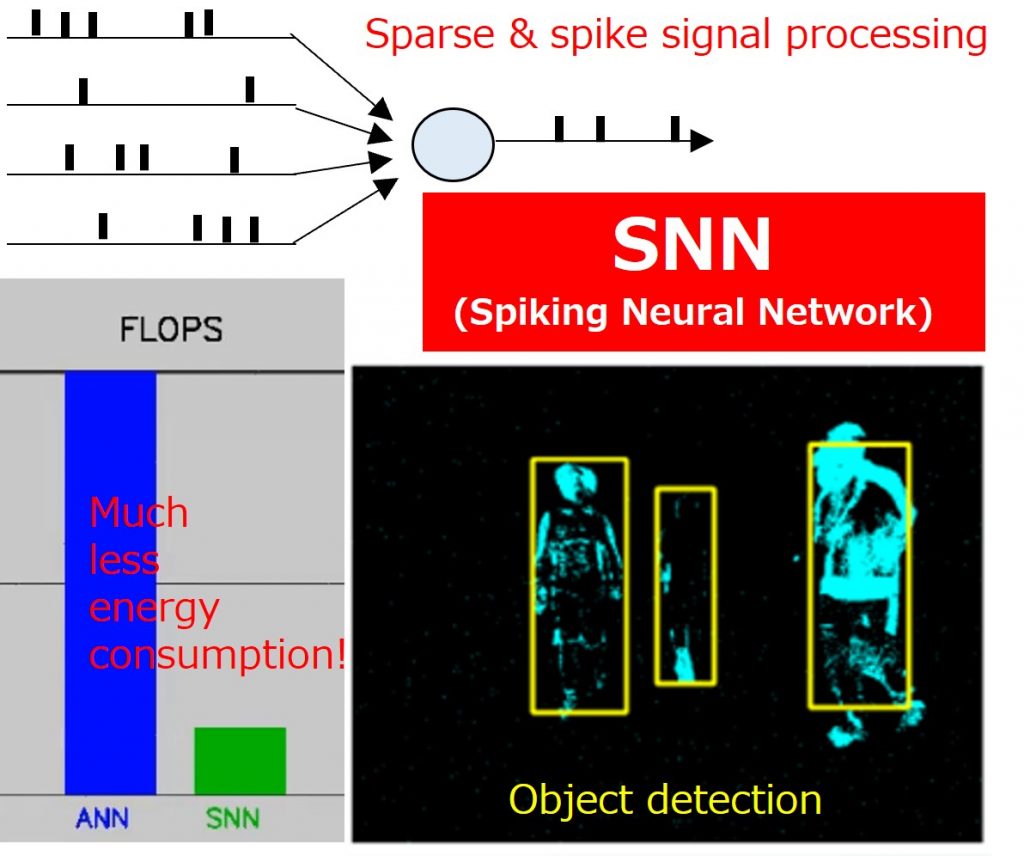
Neuromorphic computing : SNN + Event camera
Considering worldwide energy problems, Spiking Neural Networks (SNN) are attracting attention because of their high energy efficiency. SNN imitate human brain more realistically than conventional artificial neural networks by leveraging spikes and sparse signals. By mimicking biological neurons, SNN can decrease energy consumption dramatically. In addition to that, we combine the SNN with event cameras which capture the change of brightness asynchronously and sparsely. This is the best match for realizing a super low energy consumption system. We port above technologies on upcoming neuromorphic hardware.
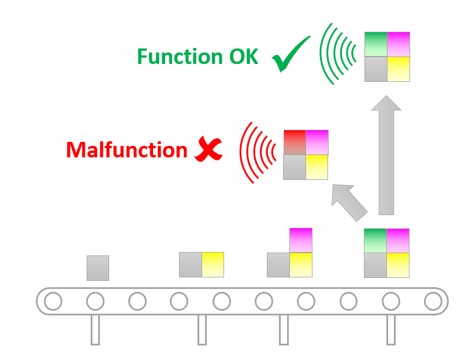
AI for Industry
Industry 4.0 is characterized by the collection and processing of large amounts of data about products and production processes in order to get new insights for manufacturing control. At IMRA we focus on the topic of Quality Control by developing new methods for product malfunction detection relying on Anomaly Sound Detection.
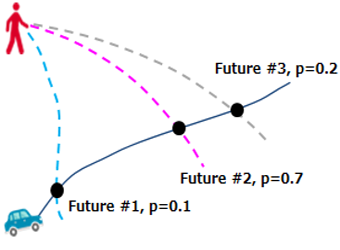
Prediction and anticipation of futures states of movable objects
Future prediction is a key component of human intelligence. It allows human to act safely in an uncertain environment. We approach the future prediction by modelling the uncertainty and the multi-modality of the future states of objects. We aim for prediction and anticipation of future states of movable objects, using IMRA’s thousands of hours of labelled driving video data.
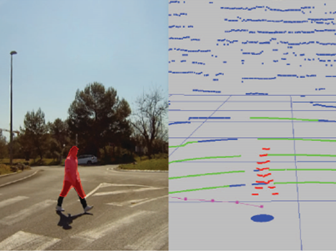
Creation of algorithms for 3D spatial-temporal data modeling
Recent sensor technologies enables us to obtain accurate 3D spacial data and high temporal resolution data, like lidar and event camera.
These kinds of data give us many ideas, but on the other hand, we often face difficulties how to deal with them because of their sparseness and data structure, which are completely different from RGB image processing.
IMRA is working on "3D spatial-temporal data modeling", especially, how to use the features of these data, how to represent these data as "like an image data" in order to use them into deep learning, etc.
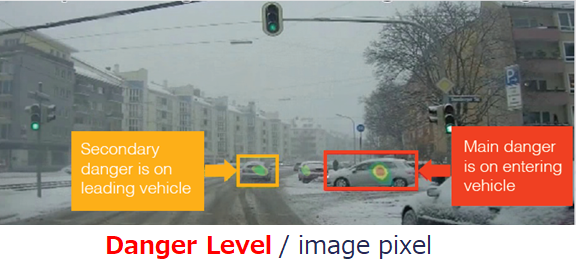
Methods to copy human thinking
Next generation of automotive driving support requires the ability to anticipate driving hazards better than humans. Such function would allow a safer control of vehicle trajectory. We are preforming research to establish a novel method for hazard anticipation in every scene by embedding human experience. We collect this experience from driving psychology questionnaires and confirming it by bio signals analysis. Our method to reproduce this danger ranking experience is inspired from humans which by combining information from obstacles, motion, distance, possible trajectories, focus and anticipation are able to reason about the context of new scenes to rank the danger in the scene. One challenging task of this research is to train Deep Neural Network from few examples of hazard (only 5% of scene contain hazards).
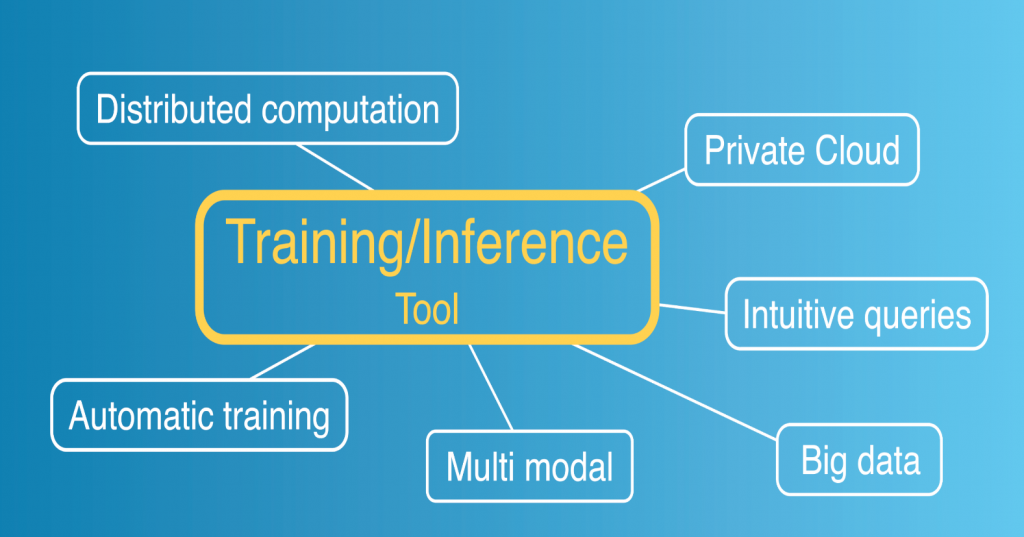
Advanced computer cluster for research
Deep Learning is a burgeoning topic which requires some material : the data. For Deep Learning problematic, we often find Big Data subjects. Here, we developed a tool completely automatize to easily use deep learning on big data.
Starting from our 1.000 h of driving video database, we developed this tool to manage all this database and all our models of deep learning. We finally reached the level of a fully automated tool for all steps of deep learning and big data : from Automatic Training to Benchmark Analysis