• Overview
• Event camera has several advantages such as asynchronously, sparsely, high speed and dynamic range.
• Especially, capturing signal sparsely contributes a lot on low energy consumption because if there is no event (brightness change), no signal exists, it means that energy consumption of camera itself is very low
• However, from image data processing point of view, it is difficult to handle this data because it is not frame based
• As another point, as event data is spike (binary signal), it is less rich than conventional imager whose signal has gradated intensity level. Therefore, when we develop object detection on event data, the performance decrease compared with for example on RGB data in general
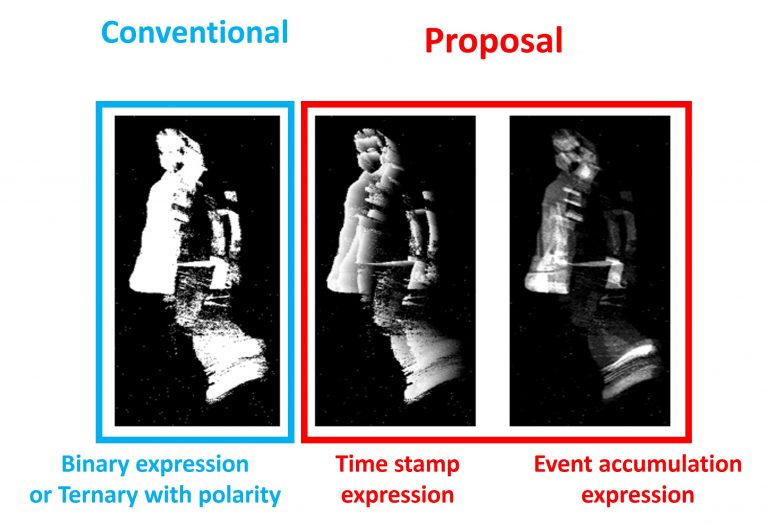
• In order to make the most of event data, we are developing data representation of event data
• Description
• For feeding event data to Deep Neural Network, at first, we convert event data to frame data, then, in order to give richer information on the frame data, number of event accumulations and time stamp information were added on each pixels
• About time stamp information, we assigned pixel value that is determined by how sooner the event appeared
• Achievement
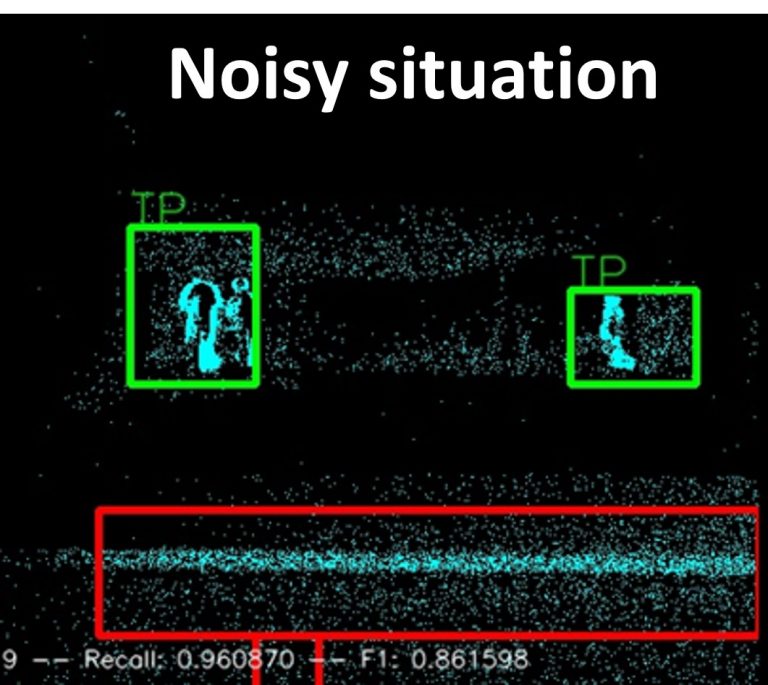
• Compared with conventional methods that make binary frame data, we improve F1 score in object detection by using above data representation