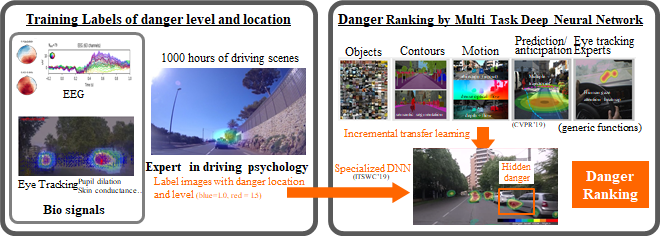
Danger labels by driving instructors or by bio signals (ongoing) to avoid subjectivity. It enabled us to create a small dataset of scenes with level of hazard
Train DNNs to perceive the world as drivers (object, contours, motion, prediction, saliency)
Incremental transfer learning of generic functions for reasoning about hazard in new scenes
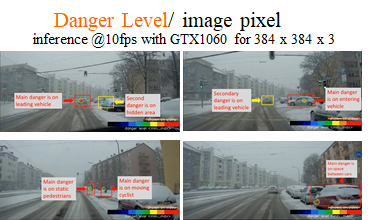
Output dense map from few training pixels This approach enables hazard raking in every scene
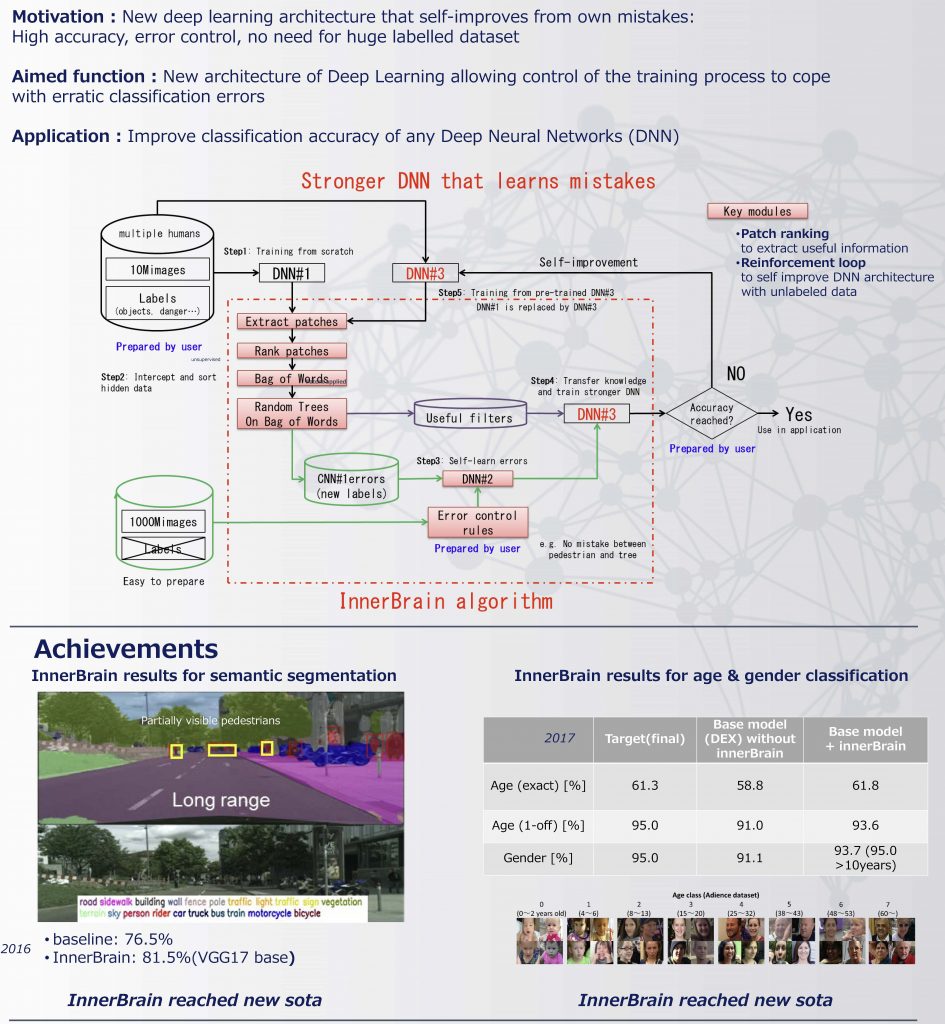
Achievement
Feasibility to reproduce by DNN subjectively rated information: the first DNN of its kind
Multi-task fusion of transfer learning blocks was realized (FCN8s-Pyramid architecture) and analysis suggests that danger ranking benefits from transfer learning
Realizing the danger map with the function of prediction and anticipation of Hazards
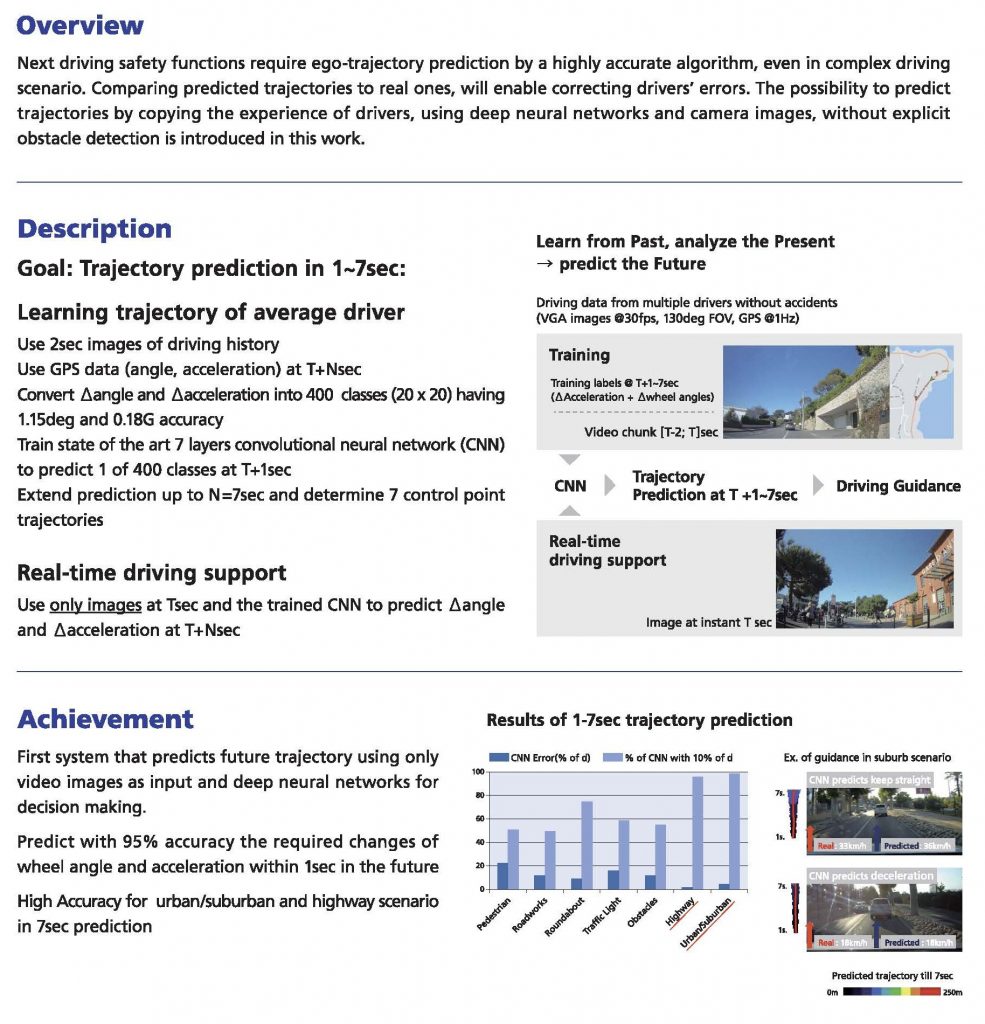
Safe vehicle trajectory prediction using deep neural networks and camera images